
Core Engine
The Core Engine is the core component of the Architecture. It executes at runtime the Application code.
Note
In the following explanations, the term task refers to native tasks scheduled by the underlying OS or RTOS, while thread refers to MicroEJ threads scheduled by the Core Engine.
Block Diagram
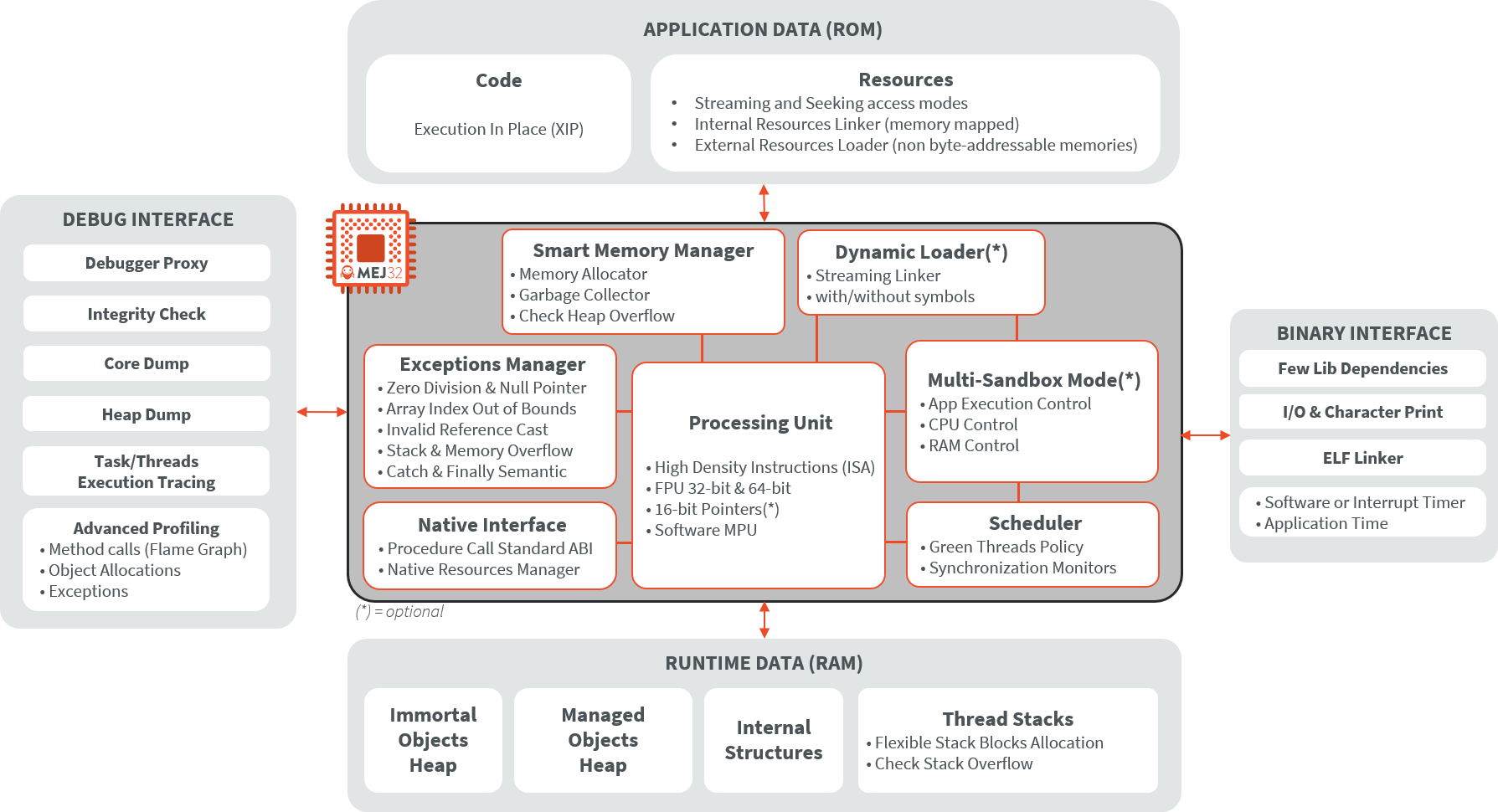
Core Engine Block Diagram
Link Flow
The following diagram shows the overall build flow. Application development is performed within MICROEJ SDK. The remaining steps are performed within the C third-party IDE.
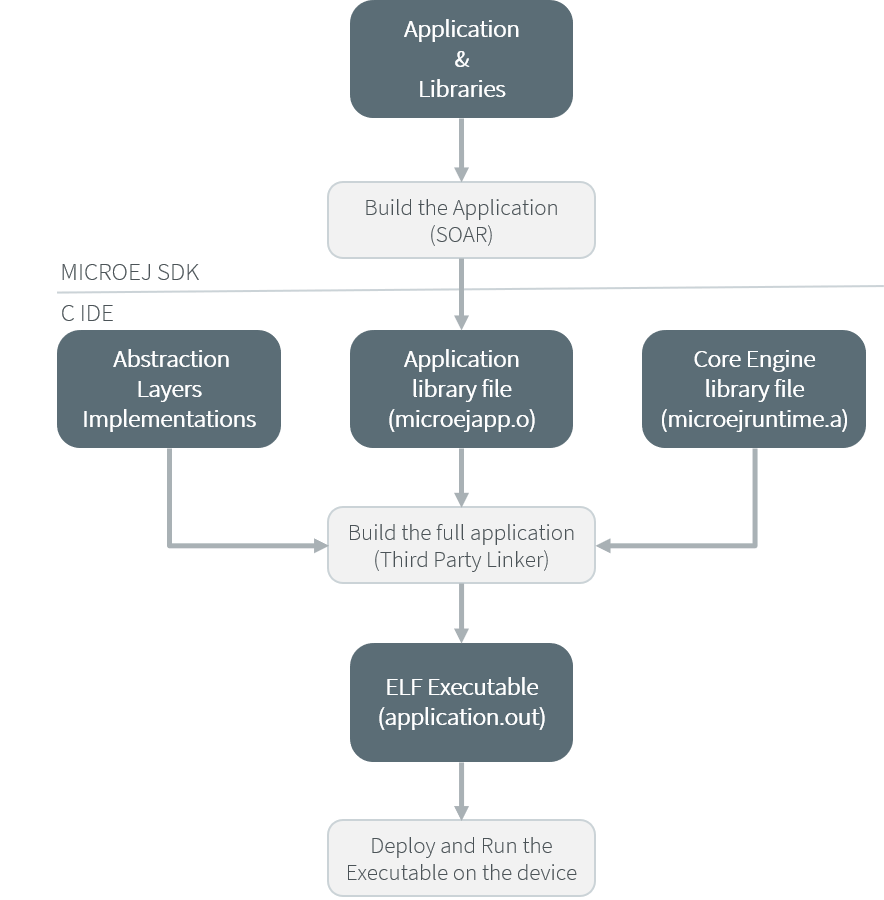
Core Engine Flow
Step 1 consists in writing an Application against a set of Foundation Libraries available in the VEE Port.
Step 2 consists in compiling the Application code and the required libraries in an ELF library, using the SOAR.
Step 3 consists in linking the previous ELF file with the Core Engine library and a third-party BSP (OS, drivers, etc.). This step requires a third-party linker provided by a C toolchain.
Architecture
The Core Engine and its components have been compiled for one specific CPU architecture and for use with a specific C compiler.
Refer to the chapter Architectures MCU / Compiler for list of supported Architectures and the details of ABI and compiler options.
Threading Integration
The Core Engine implements a green thread model. It runs in a single task.
Green threads are threads that are internally managed by the Core Engine instead of being natively managed by the underlying OS/RTOS scheduler. The Core Engine defines a multi-threaded environment without relying on any native OS capabilities.
Therefore, the whole Managed world runs in one single task, within which the Core Engine re-creates a layer of (green) threads. One immediate advantage is that the Java-world CPU consumption is fully controlled by the task it is running in, allowing embedded engineers to easily arbitrate between the different parts of their application. In particular in an open-to-third-parties framework, the maximum CPU time given to the Managed world is fully under control at no risk, whatever the number and/or the activities of the threads.
The next illustration shows 4 tasks, with the last one running the Core Engine with 2 threads. When the last task is scheduled by the underlying OS, the Core Engine executes and schedules the threads.
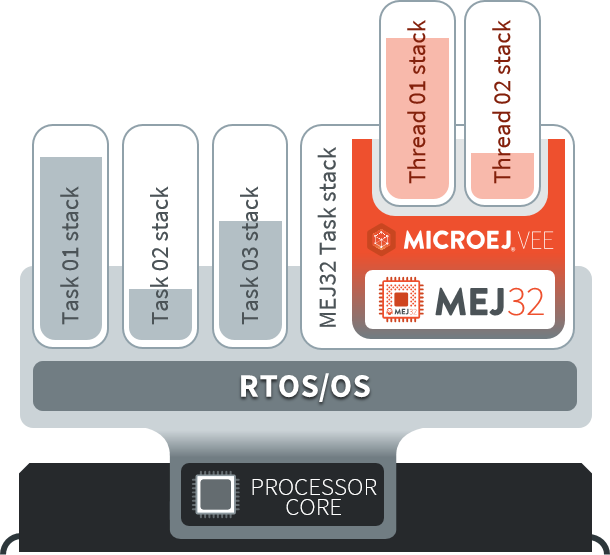
A Green Threads Architecture Example
The activity of the Core Engine is defined by the Application. When the Application is blocked (i.e., when all the MicroEJ threads sleep), the task running the Core Engine sleeps.
Capabilities
The Core Engine defines 3 exclusive capabilities:
Mono-Sandbox: capability to produce a monolithic Executable (default one).
Multi-Sandbox: capability to produce a extensible Executable on which new applications can be dynamically installed. See section Multi-Sandbox.
Tiny-Sandbox: capability to produce a compacted Executable (optimized for size). See section Tiny-Sandbox.
All the Core Engine capabilities may not be available on all architectures. Refer to section Supported Core Engine Capabilities by Architecture Matrix for more details.
To select the Core Engine capability, define the property com.microej.runtime.capability
in the configuration.properties file (SDK 6) or in the mjvm/mjvm.properties file (SDK 5)
of the VEE Port project, with one of the following values:
monofor Mono-Sandbox (default value)multifor Multi-Sandboxtinyfor Tiny-Sandbox
If the property com.microej.runtime.capability is not defined,
the Mono-Sandbox Core Engine capability is used.
Implementation
The Core Engine implements the [SNI] specification.
It is created and initialized with the C function SNI_createVM.
Then it is started and executed in the current task by calling SNI_startVM.
The function SNI_startVM returns when the Application exits or if
an error occurs (see section Error Codes).
The function SNI_destroyVM handles the Core Engine termination
and must be called after the return of the function SNI_startVM.
Only one instance of the Core Engine can be created in the system,
and both SNI_createVM and SNI_destroyVM should only be called once.
When restarting the Core Engine, don’t call SNI_createVM or SNI_destroyVM
before calling SNI_startVM again.
For more information, refer to the Restart the Core Engine section.
The file LLMJVM_impl.h that comes with the Architecture defines the API
to be implemented. See section LLMJVM: Core Engine.
Initialization
The Low Level Core Engine API deals with two objects: the structure that represents the Core Engine, and the task that runs the Core Engine. Two callbacks allow engineers to interact with the initialization of both objects:
LLMJVM_IMPL_initialize: Called once the structure representing the Core Engine is initialized.LLMJVM_IMPL_vmTaskStarted: Called when the Core Engine starts its execution. This function is called within the task of the Core Engine.
Scheduling
To support the green thread round-robin policy, the Core Engine assumes
there is an RTOS timer or some other mechanism that counts (down) and
fires a call-back when it reaches a specified value. The Core Engine
initializes the timer using the LLMJVM_IMPL_scheduleRequest function
with one argument: the absolute time at which the timer should fire.
When the timer fires, it must call the LLMJVM_schedule function,
which tells the Core Engine to execute a green thread context switch (which
gives another MicroEJ thread a chance to run).
When several MicroEJ threads with the same priority are eligible for execution,
the round-robin algorithm will automatically switch between these threads after a certain amount of time,
called the time slice.
The time slice is expressed in milliseconds, and its default value is 20 ms.
It can be configured at link time with the symbol
_java_round_robin_period, defined in the linker configuration file
linkVMConfiguration.lscf located in the VEE Port folder /MICROJVM/link/.
To override the content of this file, create, in the VEE Port configuration project,
a folder named /dropins/MICROJVM/link/, and copy into this folder the file
linkVMConfiguration.lscf retrieved from an existing VEE Port.
Since a symbol cannot be null, the actual time slice value in milliseconds is
_java_round_robin_period - 1. Set the symbol to 1 (i.e., time slice to 0)
to disable the round-robin scheduling.
Warning
Modifying the time slice value is an advanced configuration that can impact the performances.
Decreasing the time slice will increase the number of context switches. Therefore scheduler will use more CPU time.
Increasing the time slice can create a latency with intensive threads monopolizing the CPU.
Idle Mode
When the Core Engine has no activity to execute, it calls the
LLMJVM_IMPL_idleVM function, which is assumed to put the Core Engine task
into a sleep state. LLMJVM_IMPL_wakeupVM is called
to wake up the Core Engine task. When the Core Engine task really starts to
execute again, it calls the LLMJVM_IMPL_ackWakeup function to
acknowledge the restart of its activity.
Time
The Core Engine defines two different times:
the application time: the difference, measured in milliseconds, between the current time and midnight, January 1, 1970, UTC.
the monotonic time: this time always moves forward and is not impacted by application time modifications (NTP or Daylight Savings Time updates). It can be implemented by returning the running time since the start of the device.
The Core Engine relies on the following C functions to provide those times to the Application:
LLMJVM_IMPL_getCurrentTime: must return the monotonic time in milliseconds if the given parameter is1, otherwise must return the application time in milliseconds. This function is called by the method java.lang.System.currentTimeMillis() It is also used by the Core Engine scheduler, and should be implemented efficiently.LLMJVM_IMPL_getTimeNanos: must return a monotonic time in nanoseconds.LLMJVM_IMPL_setApplicationTime: must set the difference between the current time and midnight, January 1, 1970, UTC. Implementations may apply this time to the whole underlying system or only to the Core Engine (i.e., the value returned byLLMJVM_IMPL_getCurrentTime(0)).
Configuring Memory Dynamically
To configure the heaps sizes at the Core Engine startup time rather than at link time (see Managed Heap size configuration and Immortals Heap size configuration Application options), implement the Core Engine configuration Low Level API (see LLMJVM_CONF_impl.h):
LLMJVM_CONF_impl_get_managed_heap_memory(): allocates the Managed Heap.LLMJVM_CONF_impl_get_immortals_heap_memory(): allocates the Immortals Heap.
The Core Engine provides a default implementation for those functions which returns memory sections statically allocated using the heaps sizes Application options and third-party linker script for position.
If the default implementation is overridden, the heap configuration properties are ignored unless the custom implementation uses them.
These functions are called by the Core Engine in SNI_createVM().
Error Codes
The C function SNI_createVM returns a negative value if an error
occurred during the Core Engine initialization or execution.
The file LLMJVM.h defines the Core Engine error code constants.
The following table describes these error codes.
Error Code |
Meaning |
|---|---|
0 |
The Application ended normally (i.e., all the
non-daemon threads are terminated or
|
-1 |
The |
-2 |
Internal error. Invalid link configuration in the Architecture or the VEE Port. |
-3 |
Evaluation version limitations reached: termination of the application. See section Limitations. |
-5 |
Not enough resources to start the very first MicroEJ
thread that executes |
-12 |
Number of threads limitation reached. See sections Limitations and Option(text): Number of threads. |
-13 |
Fail to start the Application because the specified Managed Heap is too large or too small. See section Option(text): Managed Heap size (in bytes) & Limitations |
-14 |
Invalid Application stack configuration. The stack start or end is not eight-byte aligned, or stack block size is too small. See section Option(text): Number of blocks in pool. |
-16 |
The Core Engine cannot be restarted. |
-17 |
The Core Engine is not in a valid state because of one of the following situations:
|
-18 |
The memory used for the Managed Heap or Immortals Heap
does not work properly. Read/Write memory checks
failed. This may be caused by an invalid external RAM
configuration. Verify |
-19 |
The memory used for the Application static
fields does not work properly. Read/Write memory checks
failed. This may be caused by an invalid external RAM
configuration. Verify |
-20 |
KF configuration internal error. Invalid link configuration in the Architecture or the VEE Port. |
-21 |
Number of monitors per thread limitation reached. See sections Limitations and Options . |
-22 |
Internal error. Invalid FPU configuration in the Architecture. |
-23 |
The function |
-24 |
The function |
-25 |
The function |
-26 |
|
-27 |
The application object file ( |
-28 |
The function |
-29 |
The function |
Example
The following example shows how to create and launch the Core
Engine from the C world. This function (microej_main) should be called
from a dedicated task.
#include <stdio.h>
#include "microej_main.h"
#include "LLMJVM.h"
#include "sni.h"
#ifdef __cplusplus
extern "C" {
#endif
/**
* @brief Creates and starts a MicroEJ instance. This function returns when the MicroEJ execution ends.
* @param argc arguments count
* @param argv arguments vector
* @param app_exit_code_ptr pointer where this function stores the application exit code or 0 in case of error in the Core Engine. May be null.
* @return the Core Engine error code in case of error, or 0 if the execution ends without error.
*/
int microej_main(int argc, char **argv, int* app_exit_code_ptr) {
void* vm;
int core_engine_error_code = -1;
int32_t app_exit_code = 0;
// create Core Engine
vm = SNI_createVM();
if (vm == NULL) {
printf("MicroEJ initialization error.\n");
} else {
printf("MicroEJ START\n");
// Error codes documentation is available in LLMJVM.h
core_engine_error_code = (int)SNI_startVM(vm, argc, argv);
if (core_engine_error_code < 0) {
// Error occurred
if (core_engine_error_code == LLMJVM_E_EVAL_LIMIT) {
printf("Evaluation limits reached.\n");
} else {
printf("MicroEJ execution error (err = %d).\n", (int) core_engine_error_code);
}
} else {
// Core Engine execution ends normally
app_exit_code = SNI_getExitCode(vm);
printf("MicroEJ END (exit code = %d)\n", (int) app_exit_code);
}
// delete Core Engine
SNI_destroyVM(vm);
}
if(app_exit_code_ptr != NULL){
*app_exit_code_ptr = (int)app_exit_code;
}
return core_engine_error_code;
}
#ifdef __cplusplus
}
#endif
Restart the Core Engine
The Core Engine supports the restart of the Application after the end of its execution.
The application stops when all non-daemon threads are terminated or when System.exit(exitCode) is called.
When the application ends, the C function SNI_startVM returns.
To restart the application, call again the SNI_startVM function (see the following pattern).
// create Core Engine (called only once)
vm = SNI_createVM();
...
// start a new execution of the Application at each iteration of the loop
while(...){
...
core_engine_error_code = SNI_startVM(vm, argc, argv);
...
// Get exit status passed to System.exit()
app_exit_code = SNI_getExitCode(vm);
...
}
...
// delete Core Engine (called before stopping the whole system)
SNI_destroyVM(vm);
Note
Please note that while the Core Engine supports restart, MicroUI does not. Attempting to restart the Application on a VEE Port with UI support may result in undefined behavior.
Note
Please note that SNI_createVM and SNI_destroyVM should only be called once.
When restarting the Core Engine, don’t call SNI_createVM or SNI_destroyVM before calling SNI_startVM again.
Dump the State of the Core Engine
The internal Core Engine function called LLMJVM_dump allows
you to dump the state of all MicroEJ threads: name, priority, stack
trace, etc. This function must only be called from the Core Engine thread context and only from a native function or callback.
Calling this function from another context may lead to undefined behavior and should be done only for debug purpose.
This is an example of a dump:
=================================== VM Dump ====================================
Java threads count: 3
Peak java threads count: 3
Total created java threads: 3
Last executed native function: 0x90035E3D
Last executed external hook function: 0x00000000
State: running
--------------------------------------------------------------------------------
Java Thread[1026]
name="main" prio=5 state=RUNNING max_java_stack=456 current_java_stack=184
java.lang.MainThread@0xC0083C7C:
at (native) [0x90003F65]
at com.microej.demo.widget.main.MainPage.getContentWidget(MainPage.java:95)
Object References:
- com.microej.demo.widget.main.MainPage@0xC00834E0
- com.microej.demo.widget.main.MainPage$1@0xC0082184
- java.lang.Thread@0xC0082194
- java.lang.Thread@0xC0082194
at com.microej.demo.widget.common.Navigation.createRootWidget(Navigation.java:104)
Object References:
- com.microej.demo.widget.main.MainPage@0xC00834E0
at com.microej.demo.widget.common.Navigation.createDesktop(Navigation.java:88)
Object References:
- com.microej.demo.widget.main.MainPage@0xC00834E0
- ej.mwt.stylesheet.CachedStylesheet@0xC00821DC
at com.microej.demo.widget.common.Navigation.main(Navigation.java:40)
Object References:
- com.microej.demo.widget.main.MainPage@0xC00834E0
at java.lang.MainThread.run(Thread.java:855)
Object References:
- java.lang.MainThread@0xC0083C7C
at java.lang.Thread.runWrapper(Thread.java:464)
Object References:
- java.lang.MainThread@0xC0083C7C
at java.lang.Thread.callWrapper(Thread.java:449)
--------------------------------------------------------------------------------
Java Thread[1281]
name="UIPump" prio=5 state=WAITING timeout(ms)=INF max_java_stack=120 current_java_stack=117
external event: status=waiting
java.lang.Thread@0xC0083628:
at ej.microui.MicroUIPump.read(Unknown Source)
Object References:
- ej.microui.display.DisplayPump@0xC0083640
at ej.microui.MicroUIPump.run(MicroUIPump.java:176)
Object References:
- ej.microui.display.DisplayPump@0xC0083640
at java.lang.Thread.run(Thread.java:311)
Object References:
- java.lang.Thread@0xC0083628
at java.lang.Thread.runWrapper(Thread.java:464)
Object References:
- java.lang.Thread@0xC0083628
at java.lang.Thread.callWrapper(Thread.java:449)
--------------------------------------------------------------------------------
Java Thread[1536]
name="Thread1" prio=5 state=READY max_java_stack=60 current_java_stack=57
java.lang.Thread@0xC0082194:
at java.lang.Thread.runWrapper(Unknown Source)
Object References:
- java.lang.Thread@0xC0082194
at java.lang.Thread.callWrapper(Thread.java:449)
================================================================================
============================== Garbage Collector ===============================
State: Stopped
Last analyzed object: null
Total memory: 15500
Current allocated memory: 7068
Current free memory: 8432
Allocated memory after last GC: 0
Free memory after last GC: 15500
================================================================================
=============================== Native Resources ===============================
Id CloseFunc Owner Description
--------------------------------------------------------------------------------
================================================================================
See Stack Trace Reader documentation for SDK 6 or SDK 5 for additional info related to working with Core Engine dumps.
Dump The State Of All MicroEJ Threads From A Fault Handler
It is recommended to call the LLMJVM_dump API as a last resort in a fault handler.
Calling LLMJVM_dump is undefined if the Core Engine is not paused.
The call to LLMJVM_dump MUST be done last in the fault handler.
Trigger Core Engine Dump From Debugger
To trigger a Core Engine dump manually from the debugger, you need to set the PC (Program Counter) register
to the physical memory address of the LLMJVM_dump function.
Follow these steps:
Ensure LLMJVM_dump is not optimized out
Explicitly reference the
LLMJVM_dumpfunction in your BSP code. It is declared in theLLMJVM.hheader file.Note
If the function is not used anywhere, linker optimization may remove it, making it unavailable in the final binary.
Locate the symbol in the map file
Search for the symbol
__icetea__virtual__com_is2t_microjvm_IGreenThreadMicroJvm___dumpin your C toolchain’s.mapfile. This will give you the runtime memory address of the function.Trigger the dump via the debugger
In your debugger, set the PC register to the retrieved address. Then, resume execution to trigger the dump.
Note
LLMJVM_dump is an alias defined in intern/LLMJVM.h header file.
If you cannot find the symbol listed above,
check the macro definition in that header file to determine the actual function name being referenced and exported.
Requirements:
Embedded debugger is attached and the processor is halted in an exception handler.
A way to read stdout (usually UART).
Check Internal Structure Integrity
The internal Core Engine function called LLMJVM_checkIntegrity checks the internal structure integrity of the Core Engine and returns its checksum.
If an integrity error is detected, the
LLMJVM_on_CheckIntegrity_errorhook is called and this method returns0.If no integrity error is detected, a non-zero checksum is returned.
This function must only be called from the Core Engine thread context and only from a native function or callback. Calling this function multiple times in a native function should always produce the same checksum. If the returned checksums are different, a corruption must have occurred.
Please note that returning a non-zero checksum does not mean the Core Engine data has not been corrupted, as it is not possible for the Core Engine to detect the complete memory integrity.
The internal structures of the Core Engine that can be altered legitimately by a native function do not impact the checksum calculation. The following internal structures may be modified without affecting the checksum:
basetype fields in Java objects or content of Java arrays of base type,
internal structures modified by a
LLMJVMfunction call (e.g., set a pending Java exception, suspend or resume the thread, register a resource, …).
This function affects the performances and should only be used for debug purpose. A typical use of this API is to verify that a native implementation does not corrupt the internal structures:
#include <stdio.h>
#include "LLMJVM.h"
void Java_com_mycompany_MyClass_myNativeFunction(void) {
int32_t crcBefore = LLMJVM_checkIntegrity();
myNativeFunctionDo();
int32_t crcAfter = LLMJVM_checkIntegrity();
if(crcBefore != crcAfter){
// Corrupted Core Engine internal structures
while(1);
}
}
// Hook called by the Core Engine when an integrity error is detected
void LLMJVM_on_CheckIntegrity_error(uint32_t errorCode, void* errorAddress) {
printf("Integrity error detected at address %p (error code: %d)\n", errorAddress, errorCode);
}
Generic Output
The System.err stream is connected to the System.out print stream. See below for how to configure the destination of these streams.
Link
Several sections are defined by the Core Engine. Each section must be linked by the third-party linker. Read-Only (RO) sections can be placed in writable memories. In such cases, it is the responsibility of the BSP to prevent these sections from being written.
Starting from Architecture 8.0.0, sections have been renamed to follow the standard ELF naming convention.
Section name |
Aim |
Location |
Alignment (in bytes) |
|---|---|---|---|
|
Application heap |
RW |
4 |
|
Application Immortals Heap |
RW |
4 |
|
Application threads stack blocks |
RW [1] |
8 |
|
Application static fields |
RW |
8 |
|
Application resources (one section per resource) |
RO |
16 |
|
Application and library code |
RO |
16 |
|
Core Engine internal structures |
RW [1] |
8 |
|
Core Engine generated code |
RX |
ISA Specific |
|
Core Engine Multi-Sandbox section (Feature code chunk) |
RW |
4 |
Note
During its startup, the Core Engine automatically zero-initializes the sections .bss.microej.runtime, .bss.microej.heap, and .bss.microej.immortals.
Section name |
Aim |
Location |
Alignment (in bytes) |
|---|---|---|---|
|
Application heap |
RW |
4 |
|
Application Immortals Heap |
RW |
4 |
|
Application threads stack blocks |
RW [1] |
8 |
|
Application static fields |
RW |
8 |
|
Application resources |
RO |
16 |
|
Application and library code |
RO |
16 |
|
Core Engine internal structures |
RW [1] |
8 |
|
Core Engine generated code |
RX |
ISA Specific |
Note
During its startup, the Core Engine automatically zero-initializes the sections ICETEA_HEAP, _java_heap, and _java_immortals.
Dependencies
The Core Engine requires an implementation of its low level APIs in order to run. Refer to the chapter Implementation for more information.
Installation
The Core Engine and its components are mandatory. By default, it is configured with Mono-Sandbox capability. See the Capabilities section to update the Core Engine with Multi-Sandbox or Tiny-Sandbox capability.
Abstraction Layer
Core Engine Abstraction Layer implementations can be found on MicroEJ Github for several RTOS.
Memory Considerations
The memory consumption of main Core Engine runtime elements are described in the table below.
Runtime element |
Memory |
Size in bytes (Mono-sandbox) |
Size in bytes (Multi-Sandbox) |
Size in bytes (Tiny-Sandbox) |
|---|---|---|---|---|
Object Header |
RW |
4 |
8 (+4) |
4 |
Thread |
RW |
168 |
192 (+24) |
168 |
Call Frame Header |
RW |
12 |
20 (+8) |
12 |
Class Type |
RO |
32 |
36 (+4) |
32 |
Interface Type |
RO |
16 |
24 (+8) |
16 |
Note
To get the full size of an Object, search for the type in the SOAR Information File and read the attribute instancesize (this includes the Object header).
Note
To get the full size of a call frame, search for the method in the SOAR Information File and read the attribute stacksize (this includes the call frame header).
Use
Refer to the MicroEJ Runtime documentation.